In Computer Vision, the homography is a 3×3 transformation between any two images of the same planar surface in space. Furthermore, if a the 3-D positions of a set of fiducials are known, the homography also determines the absolute position and orientation of the camera with respect to said set of fiducials.
Suppose that for some reason you cannot trust the X coordinate of the imaged fiducials at all. Or perhaps is the X coordinate, or even the radial distance from the measurements to the optical center. In other words, suppose the image measurements are completely uncertain along a pencil of lines. Is it still possible to recover the pose and orientation of the camera if the 3-D positions of the fiducials are known?
Surprisingly, the answer is yes. If the camera translations are constrained to a plane it is still possible to fully recover the orientation and the unconstrained translations. The uncertainty in the image plane translates to a corresponding plane of uncertainty in 3-D space. Thus, we only loose one degree of freedom on the camera pose by what appears to be a catastrophic shortcoming in the imaging system.
The approach is described in US patent 8,970,709.
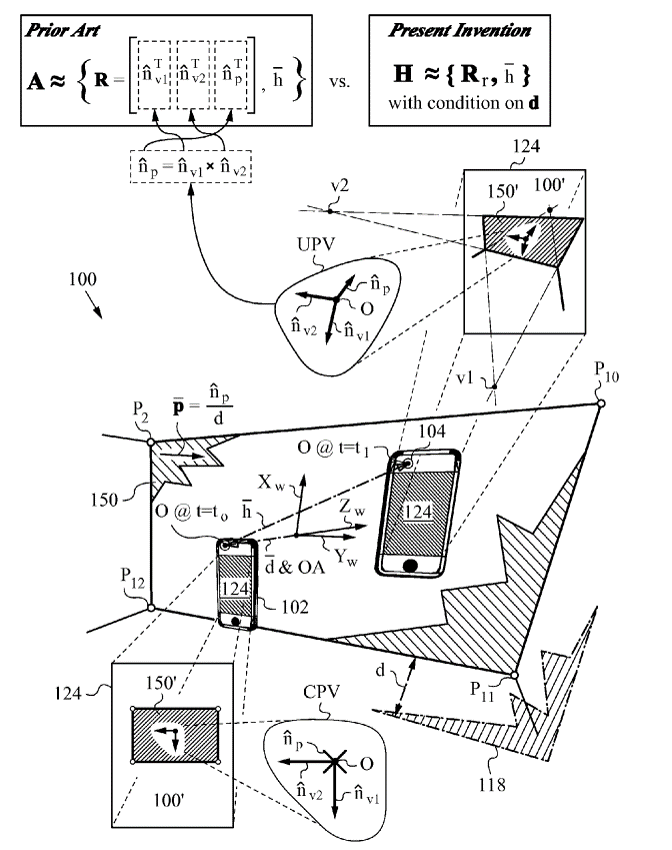
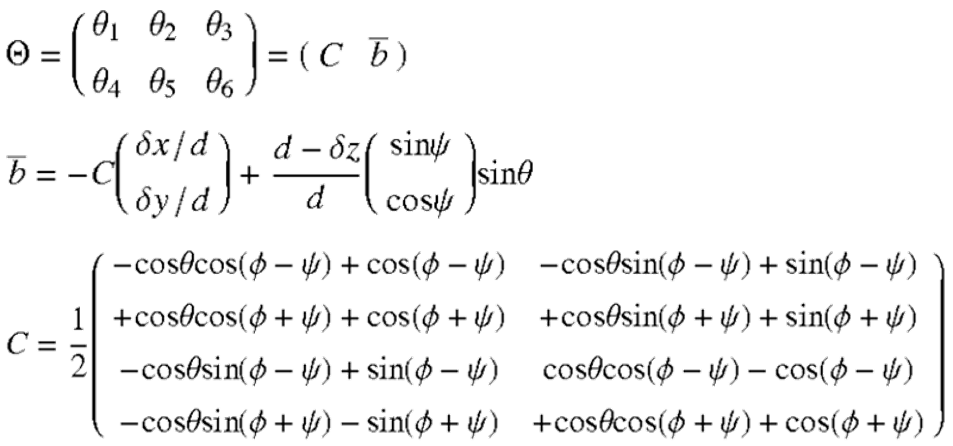
The resultant homography is a 3×2 matrix (instead of a 3×3 one):
The approach has practical consequences for non-conventional imaging systems such as PSD (positioning sensing devices), ringed Fresnel lenses, and line-scan cameras. It also has applications in egomotion applications.
